
Orthomosaik und mehr
Stich eines Altarm der Ems




 Format der Einzelbilder
Format der Einzelbilder
erstellt wurde dieses Orthophoto eines Altarm der Ems mit dem kostenfreien Programm Image Composite Editor von Mikrosoft. Das Originalbild hat eine Größe von ca. 70 MB, es ist aus ca 90 Einzelbilder zusammen gesticht worden.
Die Kamera eine einfache Canon A495 über einen USB Auslöser mit dem Pixhawk verbunden die Auslösung erfolgte über GPS Wegpunkte, auf die Camera war CHDK geladen.
Einfache Möglichkeit ein nicht georeferenziertes Bild mit dem Programm ICE zu erstellen.
Voraussetzung ist eine Kamera mit Intervallauslöser. Ist CHDK geladen, ist der Auslöser vorhanden.
GOPROs oder deren Nachbauten haben den Auslöser Serienmäßig installiert, jedoch das Ergebnis, der Bilder mit dem großen Weitwinkel, ist nicht überzeugend, zu Testzwecken aber durchaus brauchbar.
Die Anleitung basiert auf den Missionsplaner und die Flugsteuerungen von Ardupilot 3DR robotics sowie Controller die mit Ardupilot Software fliegen, wie APM2..., PX4, Pixhawk und weitere.
Wir rufen den Missionsplaner auf, gehen auf FlightPlan rechte Maustaste Polygon zeichnen.das zu befliegende Gebiet wird nun markiert.
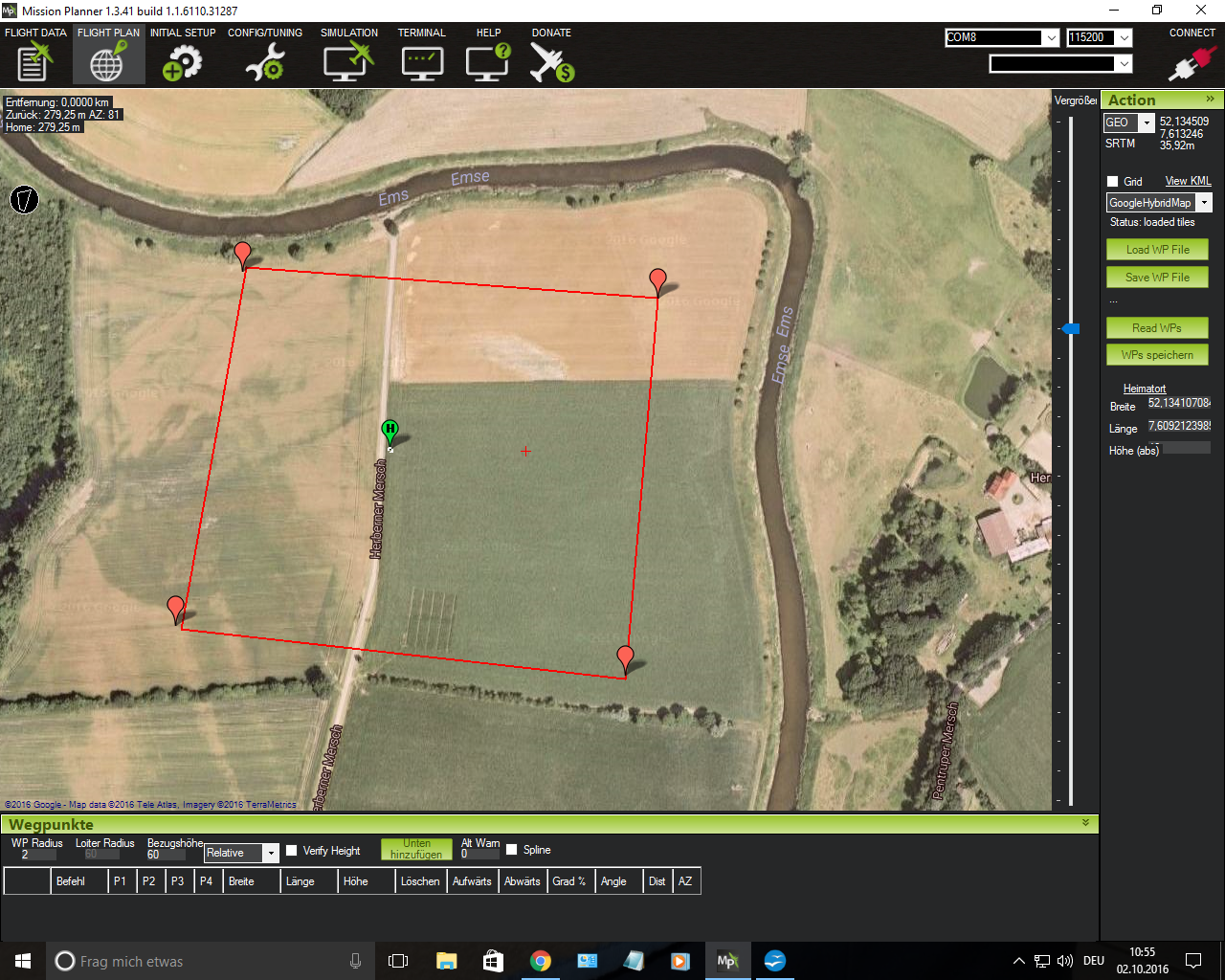
Rechte Maustaste AutoWP und Survey (Grid) es öffnet sich nun folgendes Fenster, in dem wir bereits jetzt schon eine vordefinierte Kamera auswählen können, sollte ihre Kamera nicht darunter sein, kein Problem. Wir arbeiten nicht mit einer Kameraauslösung über GPS, (wenn vorhanden kann diese genutzt werden). Wir stellen später die Kamera auf Intervall ein. Schauen wir dieses Bild:
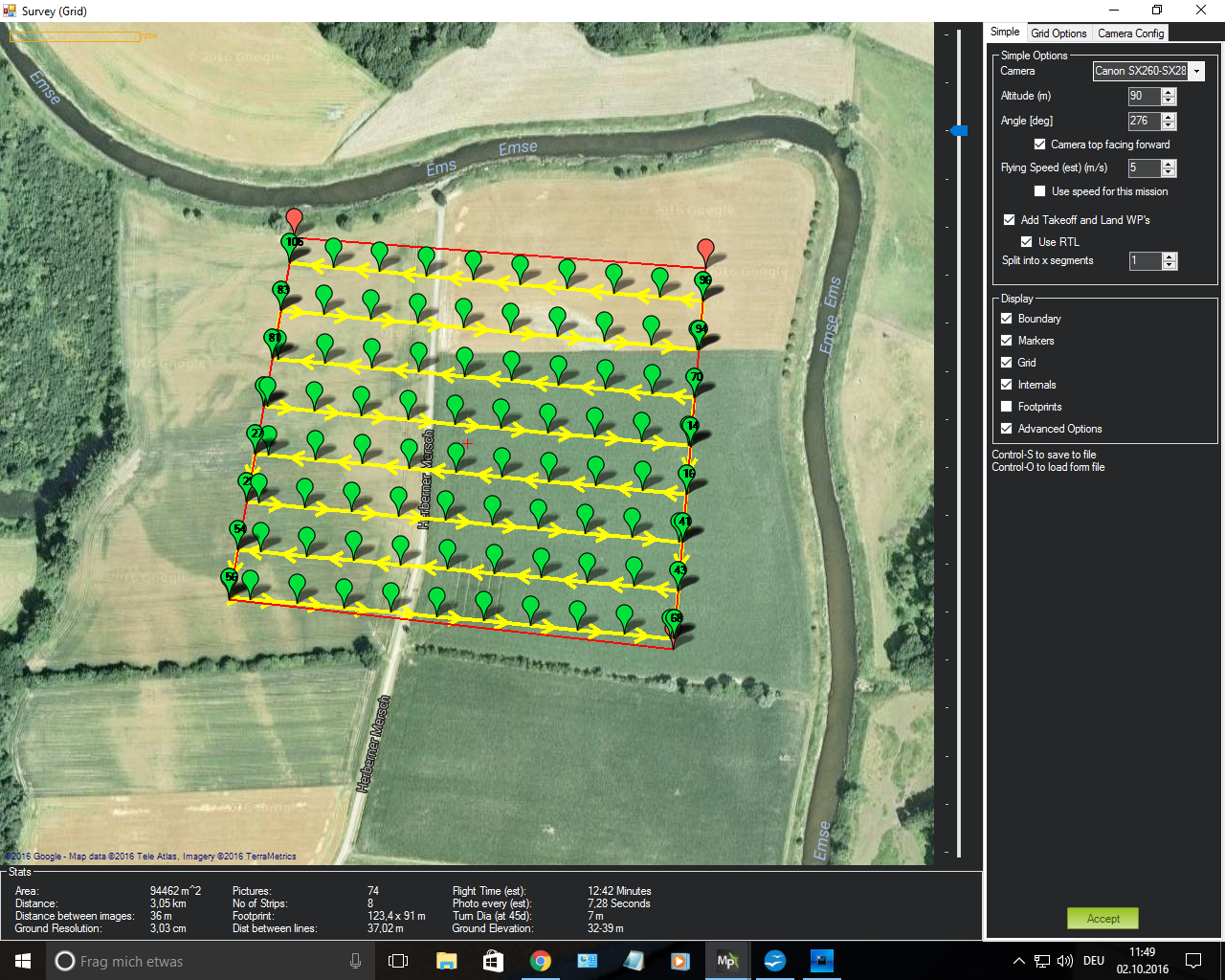
Wir sehen unten die Flight Time 12.42 Minuten, darunter finden wir den Intervall in Sekunden für den Auslöser.
Empfehlen kann ich die Zeit auf ca. 4 Sekunden einzustellen, da wir mit einer großen Bildüberlappung arbeiten müssen.
Die Einstellungen sind gemacht, wir akzeptieren und können die Daten auf den Flugcontroller laden. Zusammenfassend : die Flugzeit beträgt ca. 13 Minuten, Flughöhe 90 Meter, Auto takeoff, nach Beendigung der Mission RTL, der Kopter kehrt zur Startstelle zurück und landet.
Sehr viel Info zum Thema Geotagging
Die Flugzeiten der Multikopter sind sehr begrenzt, Geschwindigkeit im Durchschnitt ca. 5m/s, damit ist ein Befliegen großer Flächen wie z.B. in der Landwirtschaft nur sehr zeitaufwendig möglich. Es muß in Teilabschnitten geflogen. Eine Lösung stellen fast autonom fliegende RC-Modell UAV oder auch Starrflügler UAV sowie auch fixed wing UAV genannt. Diese Fluggeräte fliegen mit den gleichen Flightcontroller wie die Kopter jedoch mit einer anderen Software,
Die Studenten der ETH in Zürich haben ein informatives Video erstellt welches die Möglichkeiten aufzeigt was derzeit machbar ist.
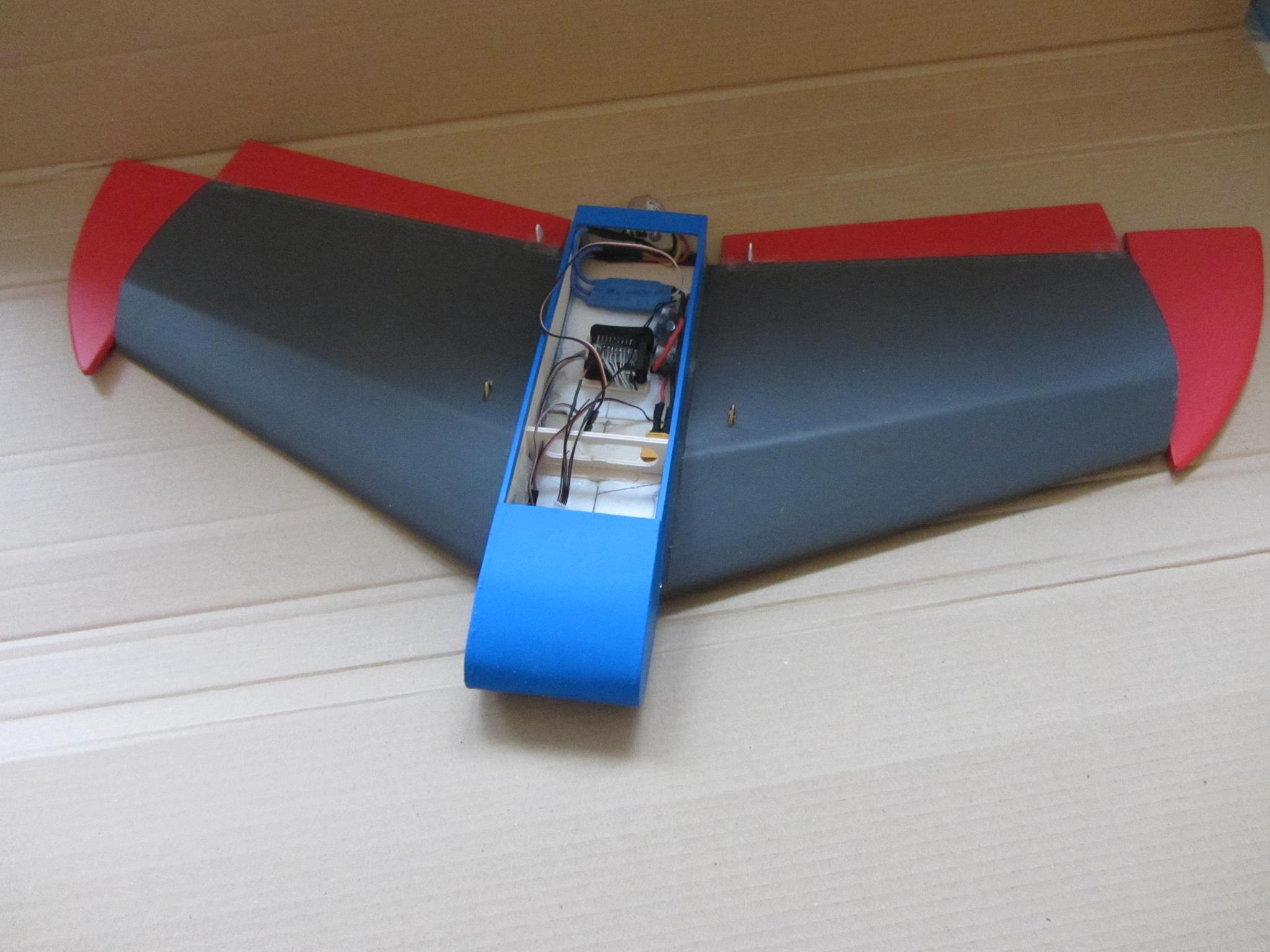
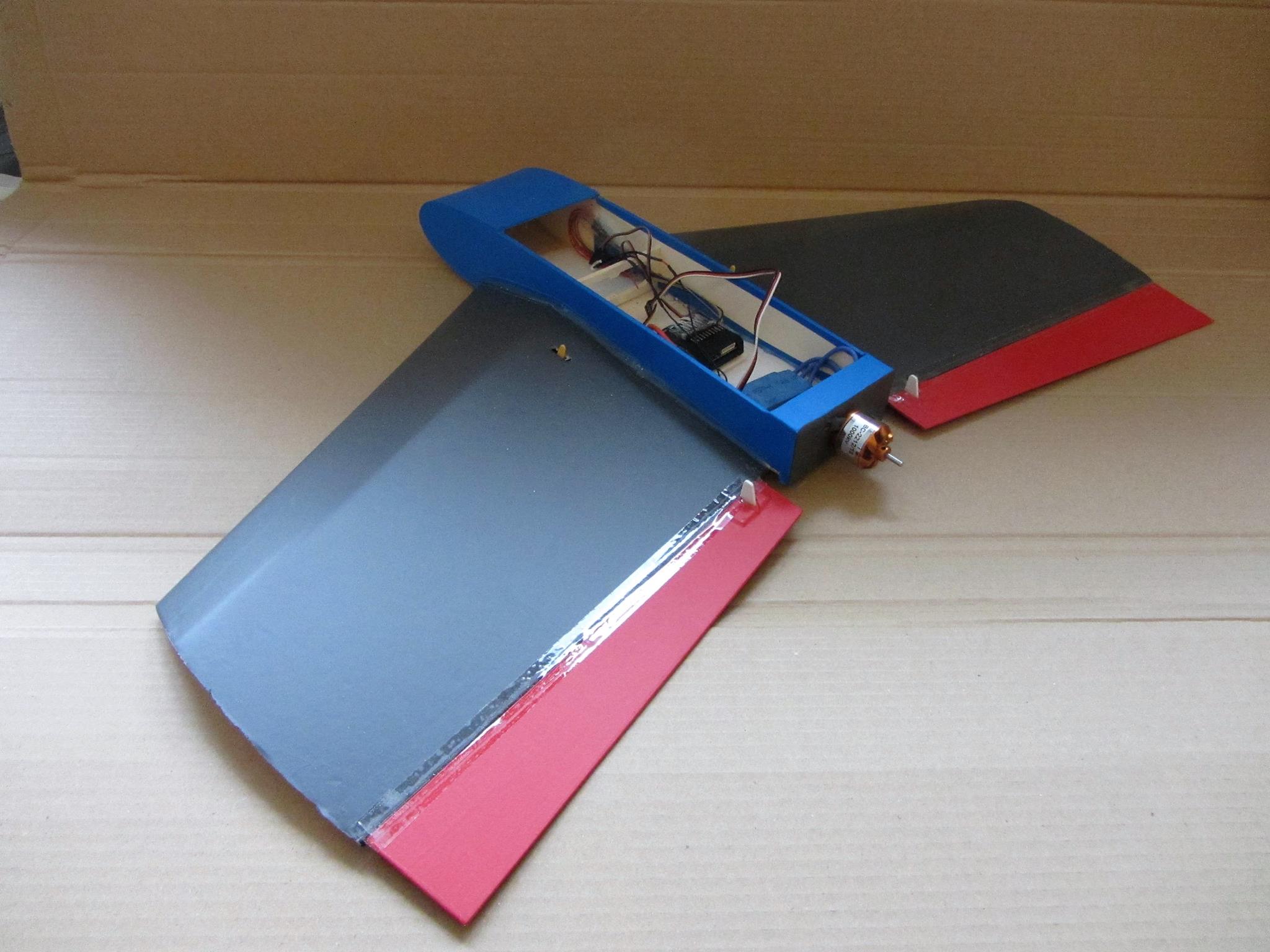
In kürze stellen wir einen kleinen UAV - Mapper vor.
Vorab ein paar Bilder vom fast fertiggestellten mini Mapper.
Daten in DXF und eine Anleitung in Kürze