
Multicopter von Tri bis Oktocopter
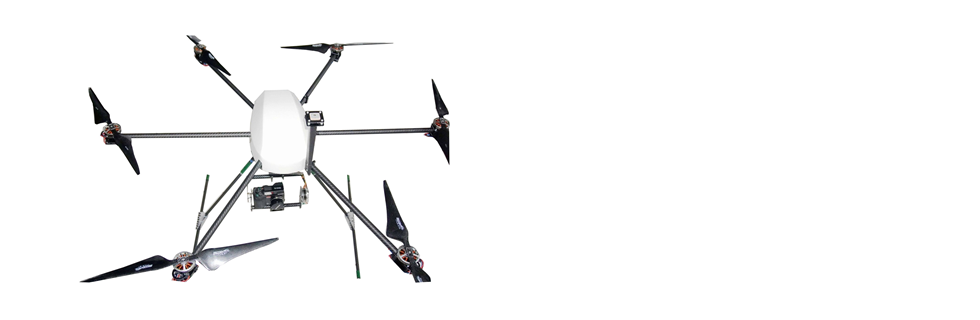
Hexacopter
auch als OKTOKOPTER
Zur Erstellung
von professionellen Filmen, Videos und Photos.
Fliegt selbstständig nach Wegpunkten. Bei einer Flugzeit von 25 Min. können sehr große Flächen erkundet werden.
Auf dem Foto ist ein 3 Achs Gimbal zu sehen, das Landegestell mit der Kamera ist frei drehbar.
Vereinbaren Sie einen Termin für einen Probeflug, Sie werden begeistert sein.
t
Oder Sie nutzen den Kopter zur Inspektion von Windkraftanlagen, Solarelementen, SchornsteinenBrückenbauwerken sowie auch von Dächer und Industriehallen.
Sollten Sie keine Flugerfahrung haben, stellen wir Ihnen zu Ihrer Sicherheit einen Übungskopter zur Verfügung, der Ihnen den Umstieg auf den großen Kopter erheblich erleichtert.
Bei einer Zuladung von 1,5 kg beträgt die Flugzeit unter optimalen Bedingungen ca. 25 Minuten.
Beispiel: mit einer Sony 6000 normal Objektiv, beträgt die Flugzeit durchschnittlich ca. 16 Minuten.
.
Technische
Daten:
- Durchmesser ca. 1000
mm, von Motorachse zu Motorachse - Länger der Luftschrauben 440 mm
- 6 Brushlessmotoren 360 KV
- 6 Brushless-Regler mit Software
Simon K - Landegestell Carbon, höhe 400 mm, kann an das Equipment angepasst werden.
- Arme Carbon
- GPS
UBLOX 8 Genauigkeit bis ca. 2 Meter - Flugsteuerung 32 Bit PIXHAWK 3D-Robotics zeichnet jeden Flug auf (
Blackbox) Mavlinkprotokoll, ( ETH Zürich)
Flugmodis: klick
Position
halten,
Position verschieben
auch die Höhe der Kopter wird auf
die passende Stelle geflogen und bleibt stehen, kein
kein steuern
erforderlich, es kann sich auf die Fotos konzentriert werden.
Zurück
zum Start:der Kopter fliegt zunächst auf eine Höhe von 15 Meter
dreht sich in Richtung Startplatz fliegt zurück, landet und stellt
die Motoren ab.
Kreismodus
Die Zuladung beträgt 1,5 kg wie zu ersehen, als Wasserballast.
Kopter fliegt eine vorher festgelegte Mission völlig autonom mit
einer abschließenden automatischer Landung.
Dieses Video zeigt eine Automission steuern ist dabei nicht erforderlich.
Verschieden Kameraprogramme
Umfangreiche
Missionsprogramme für Archäologen und Geologen
KMZ Daten können
ausgelesen und ausgewertet werden, sehr hilfreich in der Archäologie.
Optional ist es möglich bei Einsatz der Telemetrie 3DR Radio, die Wegpunkte mittels Tablet oder Handy einzugeben
Gefertigt wird der Kopter einsatzbereit mit RC-Steuerung, Gimbal, Akku und Ladegerät. Oder nach Kundenwunsch.
Ein paar Bauformen von Multirotorsystemen:




Sehr viele Infos zu dem Thema finden Sie hier:
Ardupilot klick
Multicopter Technik Einweisung von Randy Mackay.

Randy ist einer der führenden Entwickler des Ardupilot Codes für APM und Pixhawk. Die PowerPoint Animation kann hier herunter geladen werden. https://www.dropbox.com/sh/hfcbh24jac58n6k/AAApWlvmlaLhKd-6Cjqsfdzya?dl=0